新上线1个月前0 投票
这台自制双足机器人用“空气肌肉”代替电机,其创造者后来创办了先锋机器人公司
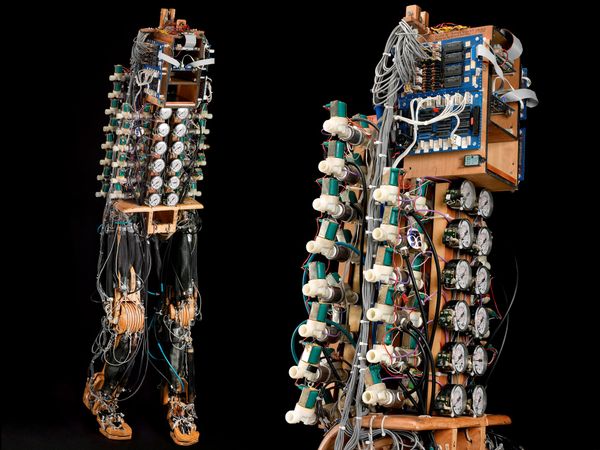
在机器人技术发展的早期,电机几乎是驱动关节的唯一选择。然而,上世纪80年代末,一群英国业余爱好者却走出了一条截然不同的道路——他们用**气动“空气肌肉”**打造了一台名为 Shadow Walker 的双足步行机器人。
Shadow Walker 没有头部和手臂,结构极其精简,但它的双腿却能在气动肌肉的驱动下完成迈步动作。所谓“空气肌肉”,是一种通过气压收缩的柔性执行器,相比传统电机,它更接近生物肌肉的力学特性:轻量、柔顺、功率密度高。这种设计灵感直接来源于人体解剖学,旨在让机器人的运动更加自然、节能。
虽然 Shadow Walker 本身并未成为商业产品,但它背后的理念和团队经验却结出了更丰硕的果实。该项目的核心成员后来共同创办了 Shadow Robot Company,一家至今仍在活跃的机器人公司。这家公司以开发高灵巧度的机械手闻名,其产品 Shadow Dexterous Hand 被全球多家研究机构用于机器人抓取和触觉感知研究。
从一台业余自制的双足机器人,到推动灵巧操作技术的商业化,Shadow Walker 的故事折射出早期机器人社群“从兴趣到产业”的典型路径。气动肌肉虽然在精度和响应速度上不及电机,但在安全交互和仿生运动方面仍有独特价值。近年来,随着软体机器人技术的复兴,空气肌肉这类柔性执行器重新受到关注。
回顾这段历史,我们或许能更深刻地理解:技术的演进并非只有一条主线。那些看似“非主流”的尝试,往往在某个节点为未来提供了意想不到的解决方案。